Category A
Basic Information
Length: 18.0cmWedth: 14.5cm
Height: 8.0cm
Weight: 0.5kg
Wheel Radius: 4.4cm
Distance between Two Wheels: 10.0cm
Battery
Chemistry: Li-PolymerCapacity: 850mAh
Output Voltage: 3.7V
Weight: 19g/0.67oz
Size: 43.8*24.6*9.6mm
Battery Life:
The typical life expectancy of the LiPo Battery is less than 300 cycles[1,2]. When people discharge them lower than 3.0V per cell, the battery life time will be shortened. In general, LiPos should be replaced after three to four years.
Category B
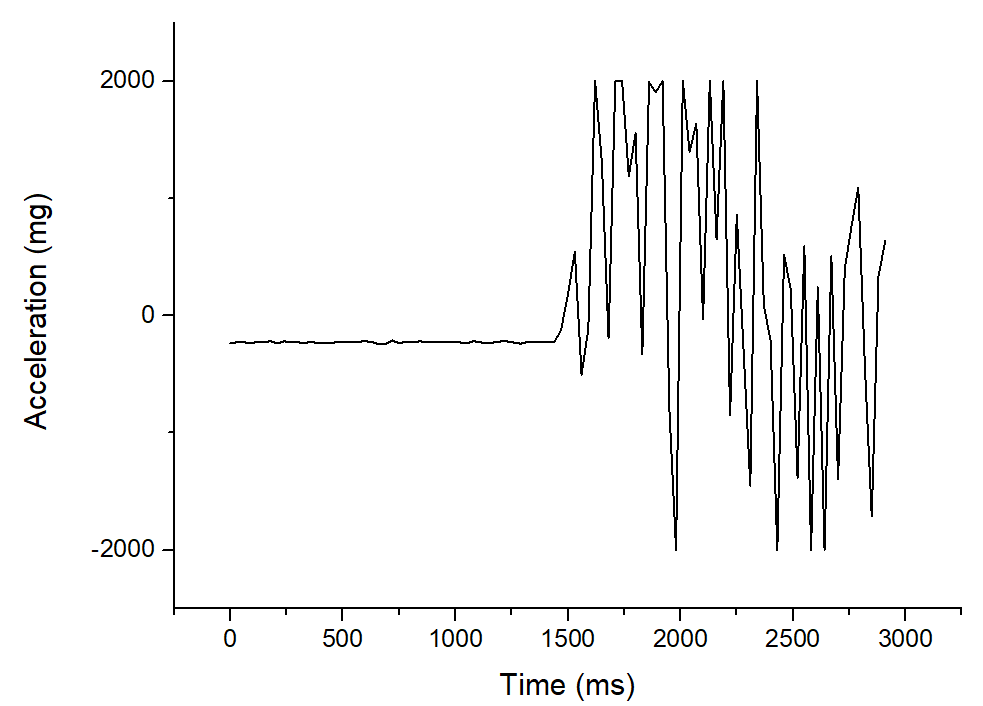
Acceleration Range
My car will turn around when I remote control it to go straight, probably because one of the wheels is loose. I would like to express my gratitude to Priyam Patel. He lent me his car so that I could finish this part tests.I taped the battery, Artemis board and the IMU sensor to the roof of the car. The x-axis of the sensor is facing directly in front of the car. Here is the picture.

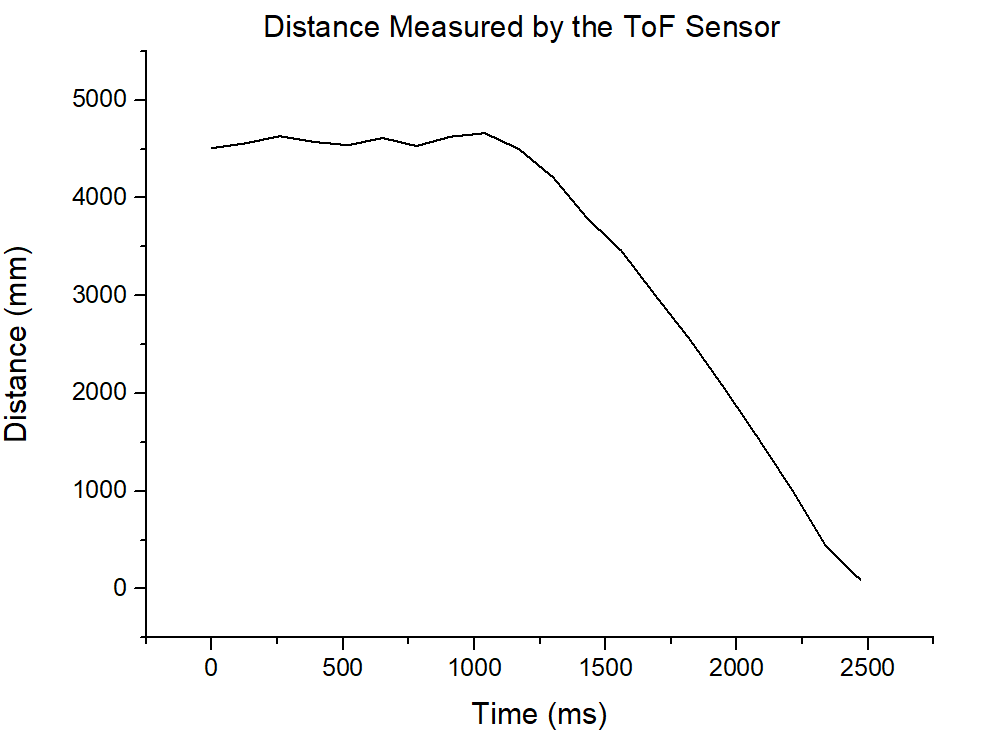
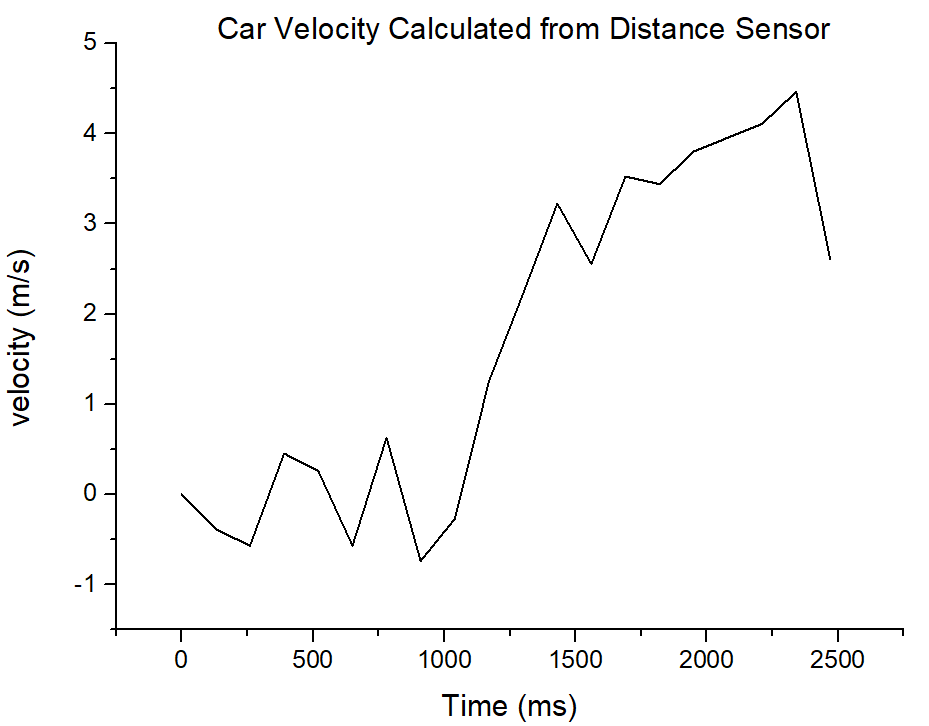
Speed Range
I used a ToF sensor to test the speed range. I tied the sensor and a piece of rubber together as shown in the picture, making sure it always faces forward.
Reference
[1]
LiPo Battery Life Expectancy Analysis_Greenway battery.
[2]How long do LiPo batteries last and how do I know if an old battery is safe?
[3] VL53L1X Datasheet.